In questa lezione ci occupiamo del metodo di Cramer (o regola di Cramer) per risolvere sistemi lineari in tre equazioni e tre incognite.
Come nel caso dei sistemi in due equazioni e due incognite, il metodo di Cramer è piuttosto meccanico. Non richiede quindi particolari trucchi o strategie. L’unico inconveniente è dato dal fatto che, avendo a sistema tre equazioni, ci ritroviamo a dover calcolare i determinanti di matrici \( 3 \times 3 \).
Tuttavia, niente panico. Tutto sta a scegliere la regola più conveniente per il calcolo dei determinanti delle matrici \( 3 \times 3 \), nell’ambito dei sistemi lineari. In questo contesto, la regola che più appare adeguata è la regola di Sarrus.
Vediamo allora subito come risolvere i sistemi lineari in tre equazioni e tre incognite con il metodo di Cramer. E prima di tutto, mostriamo come si calcola il determinante di una matrice \( 3 \times 3 \) con la regola di Sarrus. Capito questo, il metodo di Cramer per i sistemi lineari \( 3 \times 3 \) non sarà che un’estensione immediata del metodo di Cramer nel caso dei sistemi \( 2 \times 2 \).
Determinante di una matrice 3 x 3
La regola di Sarrus consente di calcolare agevolmente il determinante di una matrice \( 3 \times 3 \).
NOTA: in questa fase non ci interessa fornire la definizione di “determinante”. Possiamo vederlo semplicemente come un numero associato ad una data matrice. 😉
Consideriamo la generica matrice \( 3 \times 3 \) seguente:
\[ A = \begin{bmatrix}a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \\ a_3 & b_3 & c_3\end{bmatrix} \]
La prima cosa da fare è “prolungare” la matrice, aggiungendo alla sua destra le prime due colonne. Brevemente diciamo che dobbiamo “ripetere” le prime due colonne:
\[ \begin{bmatrix}a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \\ a_3 & b_3 & c_3\end{bmatrix}\begin{matrix} a_1 & b_1 \\ a_2 & b_2 \\ a_3 & b_3 \end {matrix} \]
Ora, disegniamo delle diagonali come segue, associando a ciascuna di esse un segno:

Consideriamo i prodotti dei termini lungo ciascuna diagonale. Ciascun prodotto avrà come segno “intrinseco” quello vicino alla corrispondente diagonale. Il segno è detto “intrinseco” poiché il segno effettivo che avrà il prodotto dipenderà anche dai segni dei termini nella diagonale. Tutto questo sarà chiaro tra un istante. 😉
Ora, il determinante della matrice, per la regola di Sarrus, è dato dalle somme algebriche di tutti i prodotti dei termini lungo ogni diagonale. Così avremo:
\[ \begin{align}&\det(A) = \det\begin{bmatrix}a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \\ a_3 & b_3 & c_3\end{bmatrix} = \\ \\ &={+a_1\cdot b_2\cdot c_3+ b_1 \cdot c_2 \cdot a_3 + c_1 \cdot a_2 \cdot b_3 – b_1 \cdot a_2 \cdot c_3 – a_1 \cdot c_2 \cdot b_3 – c1\cdot b_2 \cdot a_3} \end{align} \]
Per aiutarci a costruire ogni volta la formula (ricordarsela a memoria non è davvero il caso) possiamo usare il seguente schema:
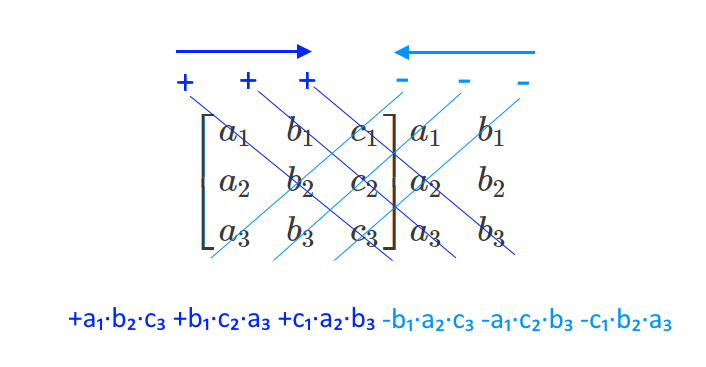
Ciascun prodotto viene scritto a partire dal segno intrinseco, e quindi moltiplicando tutti i termini lungo la diagonale. I prodotti con segno intrinseco + vengono scritti nell’ordine da sinistra verso destra, i prodotti con segno intrinseco – vengono scritti nell’ordine da destra verso sinistra. Le frecce indicano per maggior chiarezza l’ordine seguito. Non è chiaramente obbligatorio seguire questo ordine, ma a mio parere in questo modo c’è meno rischio di sbagliare.
Superato lo scoglio del calcolo di un determinate di una matrice \( 3 \times 3 \), il metodo di Cramer per risolvere un sistema lineare di 3 equazioni in 3 incognite è del tutto simile al metodo di Cramer applicato al caso di un sistema lineare di 2 equazioni in 2 incognite.
Vediamo allora subito un esempio pratico. 🙂
Esempio sul metodo di Cramer (risolvere un sistema di 3 equazioni in 3 incognite)
\[ \begin{cases}x+4y-2z+1=0 \\ \\ y-2=x+z \\ \\ 4x+2z=-7 \end{cases} \]
La prima cosa da fare quando risolviamo un sistema col metodo di Cramer è, non dimentichiamolo mai, riscrivere il sistema in forma normale.
Nel nostro caso non abbiamo termini simili per cui si tratta di mettere semplicemente in ordine i termini. Dobbiamo però stare attenti alla terza equazione. In essa, l’incognita \( y \) non compare esplicitamente. Tuttavia, poiché vogliamo utilizzare il metodo di Cramer, dobbiamo comunque scrivere l’incognita mancante attribuendole un coefficiente zero.
Dunque, per risolvere un sistema con il metodo di Cramer dobbiamo anzitutto assicurarci che sia in forma normale con anche i coefficienti nulli delle incognite indicati esplicitamente.
Ricordiamo che in un sistema in forma normale non ci devono essere termini simili, i termini con le incognite devono essere presenti solo al primo membro di ciascuna equazione e devono comparire in ordine alfabetico. I termini numerici devono invece comparire soltanto al secondo membro.
Così, il sistema una volta espresso in forma normale diviene:
\[ \begin{cases}x+4y-2z=-1 \\ \\ x-y+z=-2 \\ \\ 4x+0y+2z=-7 \end{cases} \]
Possiamo ora scrivere la matrice dei coefficienti, che chiaramente sarà una matrice con tre righe e tre colonne. Ricordiamo, la matrice dei coefficienti è una tabella contenente i coefficienti delle incognite così come compaiono nelle equazioni del sistema. Ogni riga della tabella contiene i coefficienti di una singola equazione.
\[ \begin{bmatrix} 1 & 4 & -2 \\ 1 &-1 &1 \\ 4 &0 & 2 \end{bmatrix} \]
Ora possiamo calcolarne il determinante \( D \) utilizzando la regola di Sarrus:
\[ \begin{align}&D= \det \begin{bmatrix} 1 & 4 & -2 \\ 1 &-1 &1 \\ 4 &0 & 2 \end{bmatrix} = \qquad \left(\text{matrice estesa: } \quad \begin{bmatrix} 1 & 4 & -2 \\ 1 &-1 &1 \\ 4 &0 & 2 \end{bmatrix} \begin{matrix} 1 & 4 \\ 1 &-1 \\ 4 & 0\end{matrix}\right) \\ \\ &= 1 \cdot (-1) \cdot 2 + 4 \cdot 1 \cdot 4 + (-2) \cdot 1 \cdot 0 -4\cdot1\cdot2 – 1\cdot 1 \cdot 0 -[(-2)\cdot(-1)\cdot4]= \\ \\ & = -2+16+0-8-0-8=-2 \end{align} \]
Il determinante D è diverso da zero per cui il sistema è determinato. Possiamo quindi procedere calcolando gli altri determinanti.
Poiché abbiamo tre incognite, dovremo calcolare i tre corrispondenti determinanti, ovvero:
- \( D_x \): determinante della matrice che si ottiene sostituendo la prima colonna della matrice dei coefficienti (coefficienti delle \( x \)) con i termini noti del sistema;
- \( D_y \): determinante della matrice che si ottiene sostituendo la seconda colonna della matrice dei coefficienti (coefficienti delle \( y \)) con i termini noti del sistema;
- infine, \( D_z \): determinante della matrice che si ottiene sostituendo la terza colonna della matrice dei coefficienti (coefficienti delle \( z \)) con i termini noti del sistema;
Si tratterà così di inserire ogni volta nella matrice dei coefficienti, in modo opportuno, la colonna:
\[ \begin{matrix}-1 \\ -2 \\- 7 \end{matrix} \]
che possiamo indicare come “colonna dei termini noti”, ovvero la colonna formata dai termini che compaiono al secondo membro di ciascuna equazione del sistema ridotto a forma normale.
Cominciamo sostituendo nella matrice dei coefficienti la colonna dei termini in \( x \) con la colonna dei coefficienti. Quindi, calcoliamo il determinante della matrice così ottenuta:
\[ \begin{align}&D_x = \det \begin{bmatrix}-1 & 4 & -2 \\ -2 & -1 & 1 \\ -7 &0 & 2 \end{bmatrix}=\quad \left(\text{matrice estesa: } \quad \begin{bmatrix}-1 & 4 & -2 \\ -2 &-1 &1 \\-7 &0 & 2 \end{bmatrix} \begin{matrix} -1 & 4 \\ -2 &-1 \\ -7 & 0\end{matrix}\right) \\ \\& = -1 \cdot (-1) \cdot 2 +4 \cdot 1 \cdot (-7)+0-[4 \cdot (-2)\cdot2 ]-0-[-2\cdot(-1)\cdot(-7)]= \\ \\ & = 2 -28 + 16 + 14 = 4 \end{align} \]
In modo del tutto simile calcoliamo il determinante \( D_y \) (la matrice considerata è la matrice dei coefficienti nella quale sostituiamo la colonna dei coefficienti della \( y \) con la colonna dei termini noti):
\[ \begin{align}& D_y = \det \begin{bmatrix} 1 &-1 &-2 \\ 1 &-2 & 1 \\ 4 &-7 &2 \end{bmatrix}=\qquad \left(\text{matrice estesa: } \quad \begin{bmatrix} 1 & -1 & -2 \\ 1 &-2 &1 \\ 4 &-7 & 2 \end{bmatrix} \begin{matrix} 1 & -1 \\ 1 &-2 \\ 4 & -7\end{matrix}\right) \\ \\ & = \small{1 \cdot (-2) \cdot 2 + (-1)\cdot1 \cdot 4 + (-2) \cdot 1 \cdot (-7) -[-1 \cdot 1 \cdot 2]-[1 \cdot 1 \cdot (-7)]-[-2\cdot(-2)\cdot4]= }\\ \\ & = -4-4+14+2+7-16 = -1 \end{align} \]
Infine, in modo del tutto simile, calcoliamo il determinante \( D_z \):
\[ \begin{align}&D_z = \det \begin{bmatrix} 1 &4 & -1 \\ 1 & -1 & -2 \\ 4 & 0 & -7 \end{bmatrix} =\qquad \left(\text{matrice estesa: } \quad \begin{bmatrix} 1 & 4 & -1 \\ 1 &-1 &-2 \\ 4 &0 & -7 \end{bmatrix} \begin{matrix} 1 & 4 \\ 1 &-1 \\ 4 & 0\end{matrix}\right) \\ \\ & = 1 \cdot (-1)\cdot(-7)+4\cdot(-2)\cdot4+0-[4\cdot1\cdot(-7)]-0-[-1\cdot(-1)\cdot4]= \\ \\ & = 7-32+28-4 = -1\end{align} \]
Ora abbiamo tutti gli ingredienti per poter scrivere la soluzione del sistema. Per i sistemi lineari \( 3 \times 3 \) valgono infatti le formule:
\[ x = \dfrac{D_x}{D}; \qquad y = \dfrac{D_y}{D}; \qquad z = \dfrac{D_z}{D} \]
Sostituendo i valori che abbiamo trovato per i vari determinanti otteniamo:
\[ \begin{align}& x = \dfrac{D_x}{D} = \dfrac{4}{-2}=-2 \\ \\ &y = \dfrac{D_y}{D} = \dfrac{-1}{-2}=\dfrac{1}{2} \\ \\ &z = \dfrac{D_z}{D}=\dfrac{-1}{-2}=\dfrac{1}{2} \end{align} \]
Il sistema avrà dunque come insieme delle soluzioni:
\[ S = \left\{\left(-2, \dfrac{1}{2}, \dfrac{1}{2} \right) \right\} \]
Si tratta di un insieme costituito dalla sola terna \( \left(-2, \dfrac{1}{2}, \dfrac{1}{2} \right) \).
Per quanto riguarda il metodo di Cramer per risolvere i sistemi lineari di tre equazioni in tre incognite è tutto!
Finora abbiamo sempre avuto a che fare con sistemi determinati, ovvero con sistemi che ammettono una soluzione unica. Nella prossima lezione, ci occuperemo dei casi generali e in particolare vedremo la classificazione in sistemi determinati, indeterminati ed impossibili.
NOTA: per verificare i vostri esercizi sui sistemi lineari, vi ricordo il tool: risolvere i sistemi di equazioni e disequazioni online. 😉
Un saluto e, come sempre, buono studio con Altramatica! 🙂